Arduino
Détecteur de mouvement à base de PIR
Publié le 25/11/2018
Détecter les mouvements à base d'un PIR dans une pièce en traitant l'information par un Arduino nano.
L'utilisation d'un PIR est vraiment très simple. Le PIR renvoie uniquement deux information : Voltage High ou voltage Low.
Donc il suffit juste "d'écouter" le PIR, pour voir s'il a détecté un mouvement : High voltage (détection) ou Low voltage (pas de détection) en écoutant directement sur une entrée digital de l'Arduino.
Le PIR doit être alimenté en 5V.
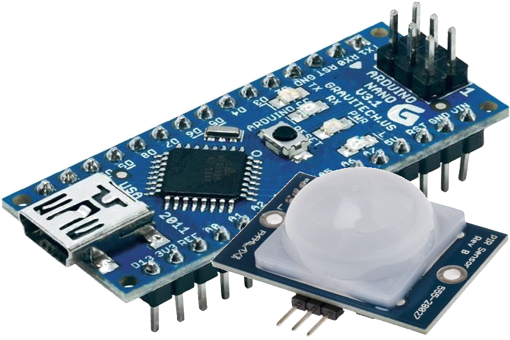
Liste des composants nécessaires pour la réalisation du circuit :
- Arduino nano1
- Détecteur PIR1
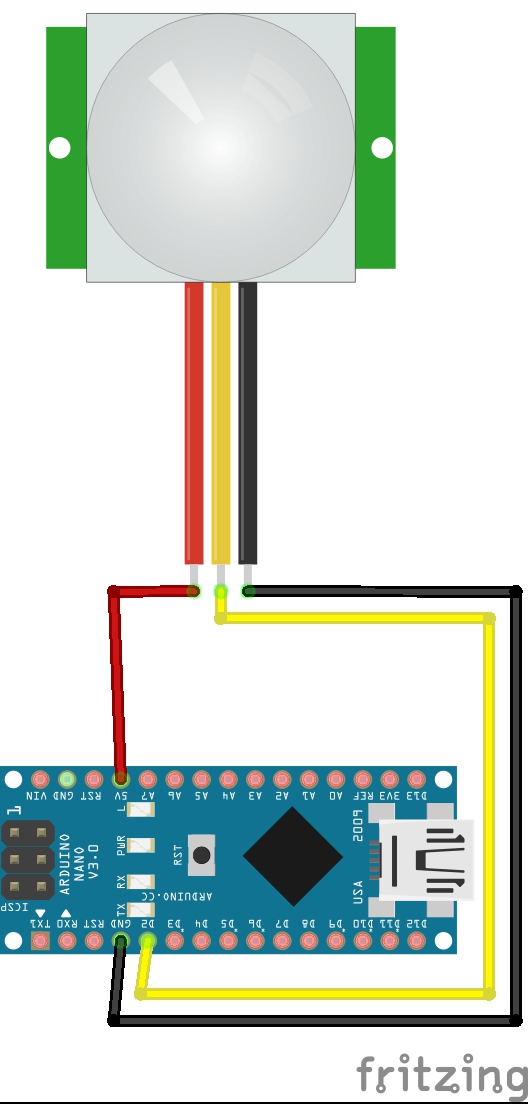
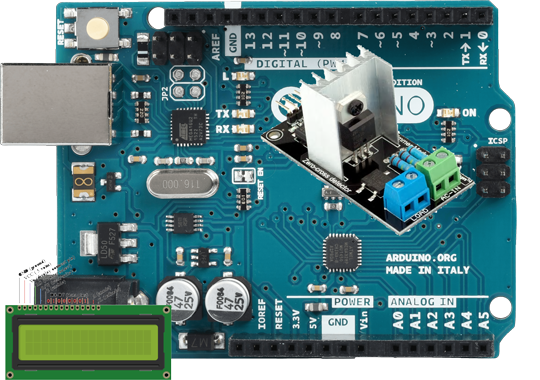
Schéma du montage électronique :
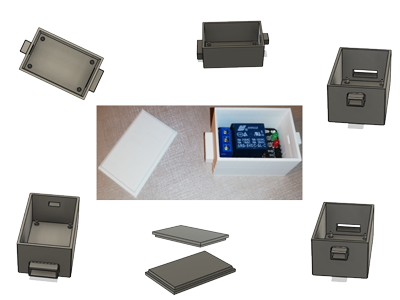
Pour les amateurs d'impression 3D, j'ai fait quelques templates qui permettent d'imprimer divers boitiers pouvant accueillir les divers composants utilisés dans mes tutoriels.
- Pour un composant PIR, vous trouverez le boitier à imprimer ici.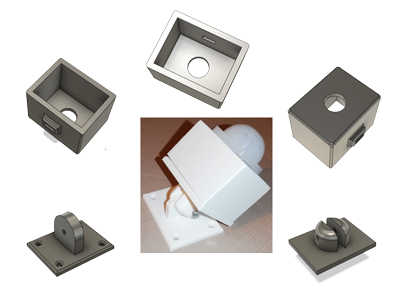
Il faut compter environ 4h pour imprimer les composants de ce boitier.
- Pour un relais, vous trouverez le boitier à imprimer ici.
Il faut compter environ 2h pour imprimer les composants de ce boitier.
L'ensemble des impressions 3D a été réalisé sur une imprimante Creality3D Ender-3 pro avec les réglages standards suivants: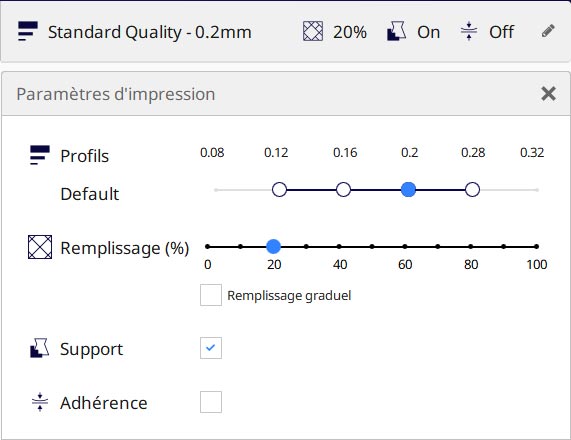
Pour les personnes possédant Fritzing, voici le schéma électronique.
Voici le code à télécharger dans votre Arduino:
#define pinPIR 2 // Pin pour le capteur PIR
void setup()
{
Serial.println(F("************"));
Serial.println(F("Arduino Nano"));
Serial.println(F("************"));
Serial.println(F(""));
Serial.println(F("\nInitialisation..."));
Serial.println(F(""));
Serial.println(F("Connection du capteur PIR"));
Serial.println(F(""));
Serial.println(F("************************"));
Serial.println(F(" 3.3v 5v *"));
Serial.println(F("* GND DATA VCC *"));
Serial.println(F("* . . . *"));
Serial.println(F("* *"));
Serial.println(F("* *"));
Serial.println(F("* O O *"));
Serial.println(F("* Timer Sensi *"));
Serial.println(F("************************"));
Serial.println(F(""));
Serial.print(F("On calibre le capteur PIR (7s)"));
for(int i = 0; i < 7; i++)
{
Serial.print(F("."));
delay(1000);
}
Serial.println(F(""));
pinMode(pinPIR, INPUT_PULLUP);
}
//*****************************************************************************************//
// MAIN LOOP
//*****************************************************************************************//
void loop()
{
int val = digitalRead(pinPIR);
Serial.print("val=");
Serial.print(val);
Serial.println("");
// A chaque nouveau mouvement on retarde le chrono
if (val == HIGH)
{
Serial.println(F(" Mouvement"));
Serial.println(F(" Pause 1s"));
delay(1000);
}
}
Arduino
Hello World !!!
Publié le 25/11/2018
Commencer à maitriser les entrées/sorties d'un Arduino UNO.
Arduino
Détecteur de mouvement
Publié le 25/11/2018
Détecteur de mouvement à base de PIR
Arduino
Jouer avec la lumière
Publié le 25/11/2018
Jouer avec la lumière

Arduino
Jouer avec un relais
Publié le 25/11/2018
Jouer avec un relais
Arduino
Combiner un PIR, une photo-résistance et un relais
Publié le 25/11/2018
Commander un relais suite à la détection d'un mouvement dans l'obscurité.

Arduino
Détecteur de niveau d'eau maison
Publié le 08/12/2018
Le but est de détecter le niveau d'eau de ma piscine, ou de toute cuve, réserve d'eau.
Arduino
VMC automatisée commandée par Arduino UNO en Wifi
Publié le 22/12/2018
Contrôler la VMC de la maison en fonction de la température et de l'hydrométrie.
Arduino
Lumière d'ambiance (ruban LED) contrôlée par Arduino nano
Publié le 22/12/2018
Contrôler la lumière d'ambiance (ruban LED) dans une pièce.
Arduino
Jouer avec les ondes RF (NRF24L01) - Emission
Publié le 23/12/2018
Jouer avec les ondes radiofréquence à base de NRF24L01
Raspberry
Jouer avec les ondes RF (NRF2401) - Réceptions
Publié le 23/12/2018
Jouer avec les ondes radiofréquence à base de NRF2401 - Réceptions
Arduino
Lecteur d'empreinte digitale DY50
Publié le 28/04/2019
Maitriser la lecture des empreintes digitales (DY50).
Arduino
Petit robot chat Tobby
Publié le 05/05/2019
Construction d'un petit robot commandé par le port série de l'ordinateur
Arduino
Mesurer une intensité/puissance avec un capteur de courant SCT013
Publié le 09/05/2019
Mesurer une intensité/puissance avec un capteur de courant SCT013
Arduino
Variateur de lumière (Light Dimmer) pour ampoule 220v
Publié le 11/05/2019
Variateur de lumière (AC Light Dimmer) pour ampoule à incandescence 220v
Arduino
MQ-2: Detecter les gaz environnant
Publié le 13/10/2019
L'objet de ce post est de détecter différents gaz environnant tel que H2, CO, CH4...
Fusion 360
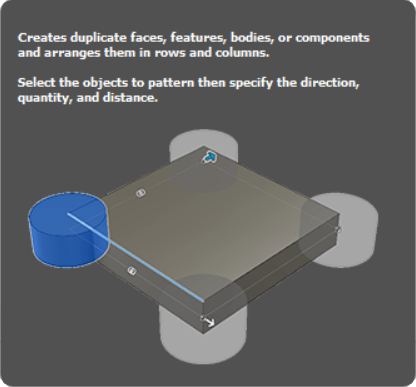
Pattern rectangulaire
Publié le 16/02/2020
Dans ce billet nous allons voir comment créer des patterns rectangulaires.
Fusion 360
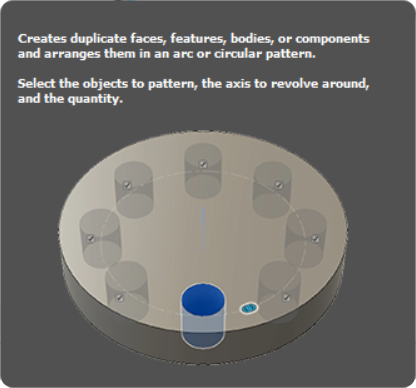
Pattern circulaire
Publié le 18/02/2020
Dans ce billet nous allons voir comment créer des patterns circulaires.
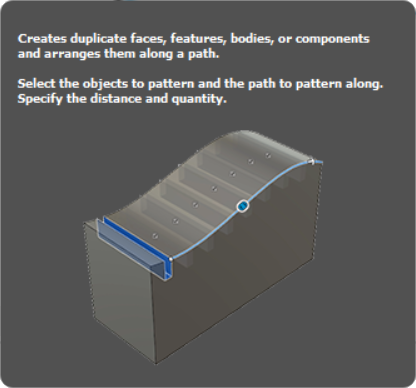
Fusion 360
Pattern sur un chemin
Publié le 21/02/2020
Dans ce billet nous allons voir comment créer des patterns sur un chemin.